Beteigeuze
All the experiences we made with our first robot over the years are incorporated into our new design.
The construction of the Kamaro 2010 was mainly focused on providing a functioning platform for the further development of electronics and software, using minimal resources. Although we reached our goal, and we use the robot as a testing platform to this date, its limitations are evident.
The high weight, inefficiency of the room management, reliability of the mechanical parts, the chassis' function and durability are as problematic as the limited room for expansion.
In the concept phase we put a lot of thought into improvements regarding every point mentioned as well as requirements for future missions. After almost two years of development, the robot Beteigeuze is now in the final stages of construction, most parts of the robot have been manufactured in workshops at the KIT. For some parts we are desperately looking for partners in manufacturing, since required machines and/or capacities are not available to us at the KIT.
The pictures illustrate the development process of our robot
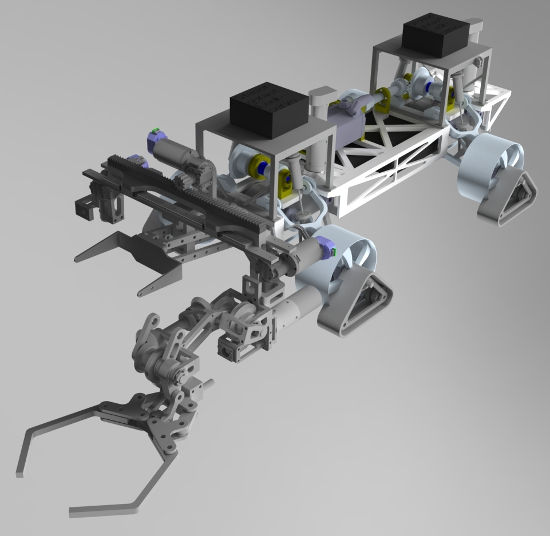
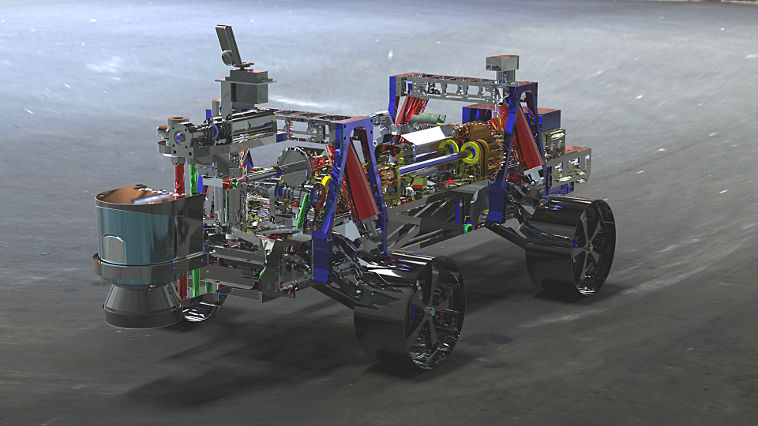
Glossy rendering with LIDAR Sensor
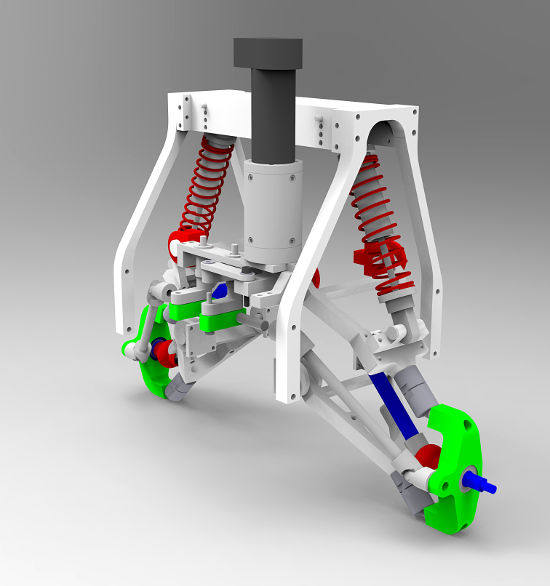
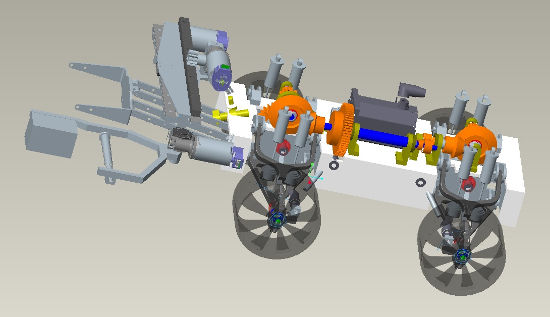
Suspension bridge and steering assembly
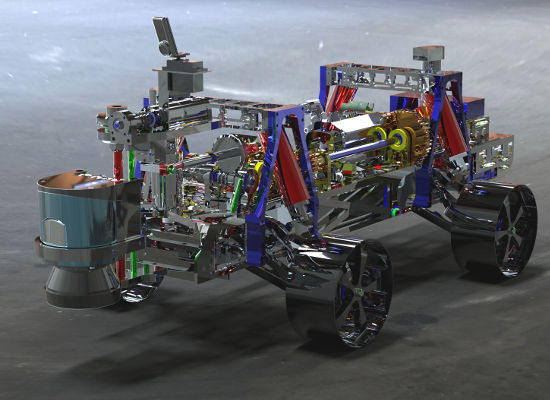
The final production model
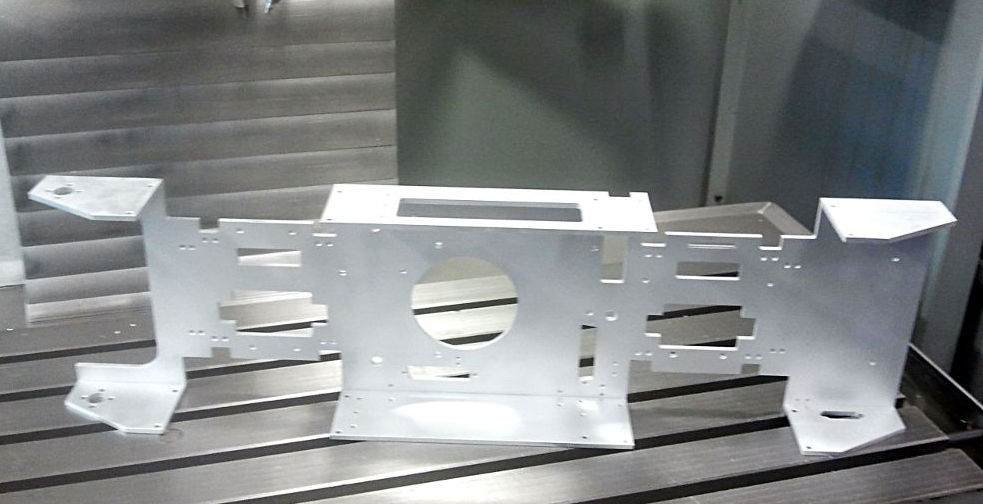
The finished chassis on the milling machine
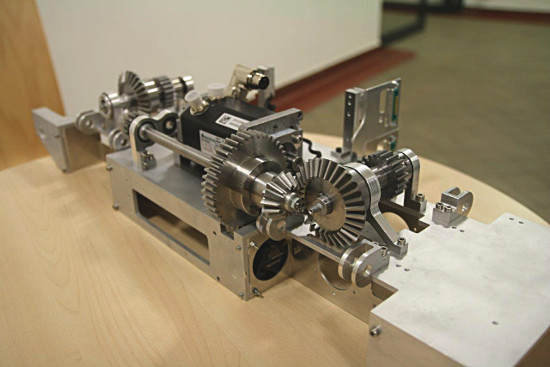
Almost complete drivetrain - Precision Engineering meets heavy metal (Electric motors have a lot of torque)
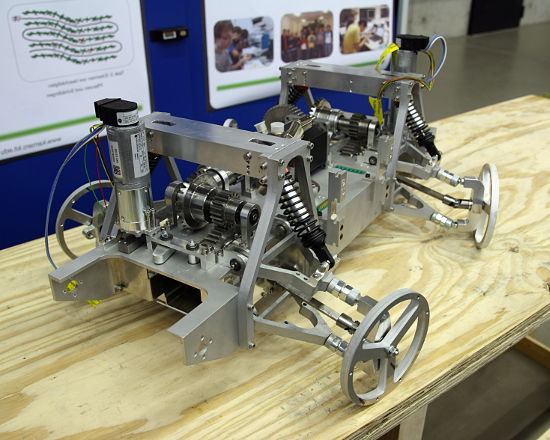
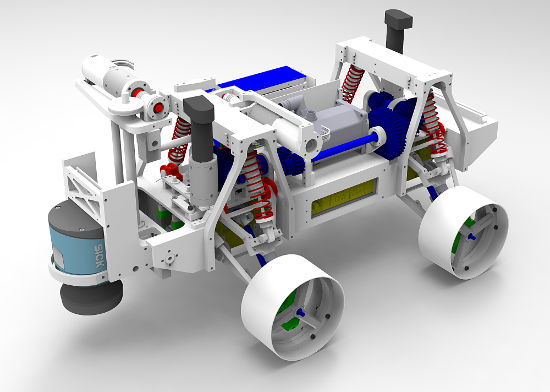
Standing on its wheels for the first time
.jpg)