KaMaRo 2010
Der erste Roboter aus dem Hause Kamaro. Eine Kiste voller Ideen - auf Rädern.
![[KaMaRo 2010]](/img/Roboter_2010_rdax_1240x659.JPG)
Allgemeines Konzept
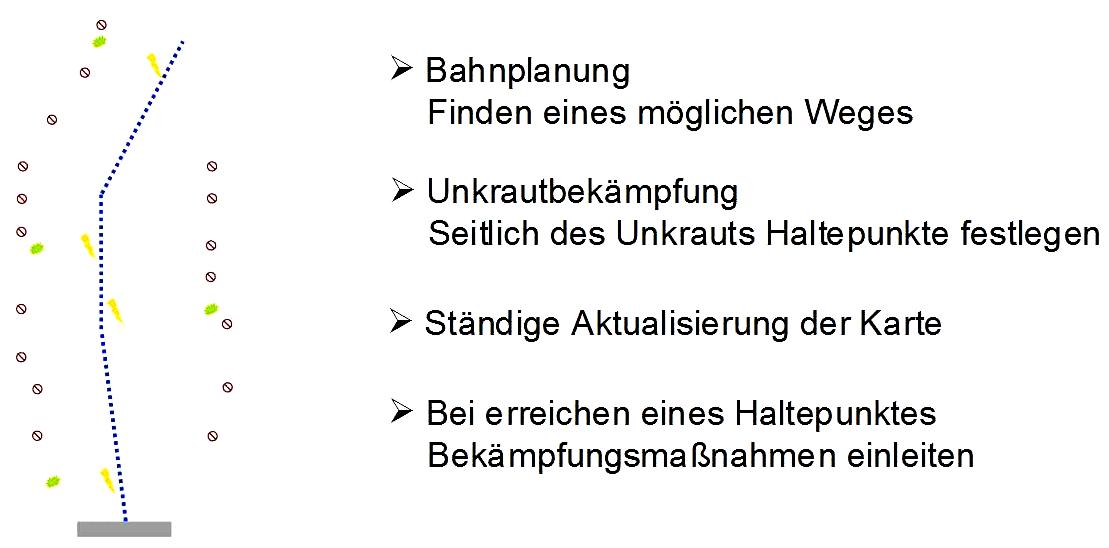
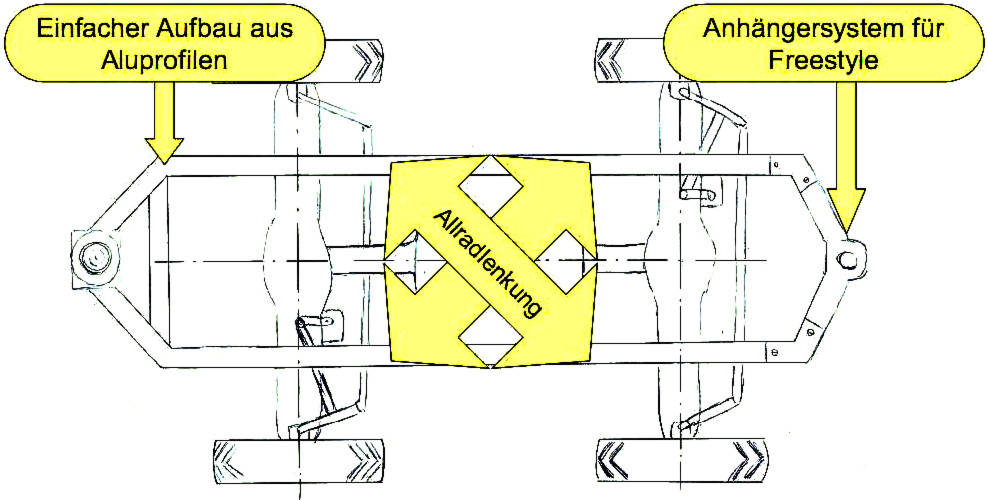
- Steuerung des Roboters über vier separat angetriebene und lenkbare Räder
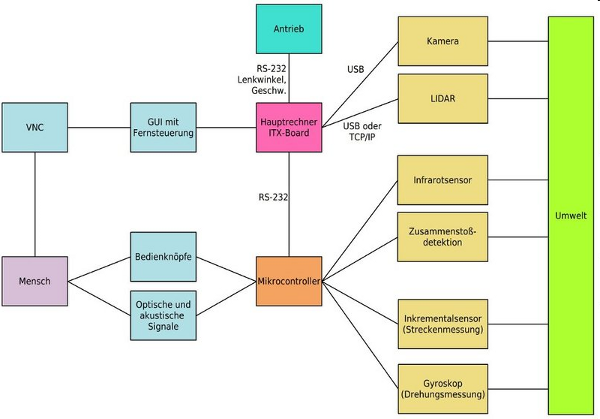
- Navigation durch einen Lasersensor mit Unterstützung durch Infrarot und einer Zusammenstoßdetektion
- Objekterkennung durch eine Kamera
- On-board Rechner auf ITX-Board
Mechanik
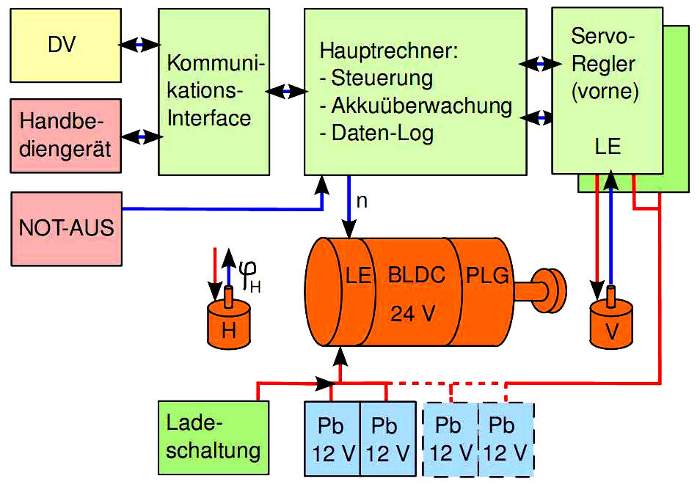
Antrieb
Datenverarbeitung