
State of the Art
Planning - ✓ Complete
Which abilities will our robot need? And how do we make it work?
Concept of Arrangement and Communication
Sensors
To meet our expectations regarding functionality, we decided to incorporate many sensors.
The robot needs to be aware of his surroundings, its own mechanics and its position. Therefore we added
- LIDAR (Laser 2-D Scanning), Ultrasonic, Infrared
- Tactile sensors as part of the mechanics
- Accelerometers, Gyroscope, Magnetometer, GPS (planned)
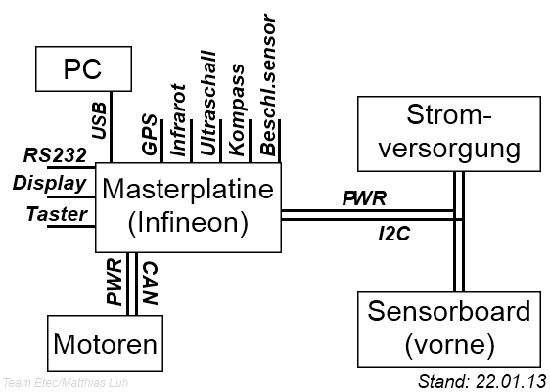
The Electronics will be split up into three modular subsystems.
- Power Supply
- Main Communication and Sensor Data Interface
- Auxiliary Sensor PCB (Preprocessing of the front-sensor data)
Communication
Three different bus systems will be used.
- Communication between PCBs: I²C
- Communication between PCBs and Main Computer: UART via USB
- Communication between PCBs und Motors: CAN
Designphase- ✓ Complete
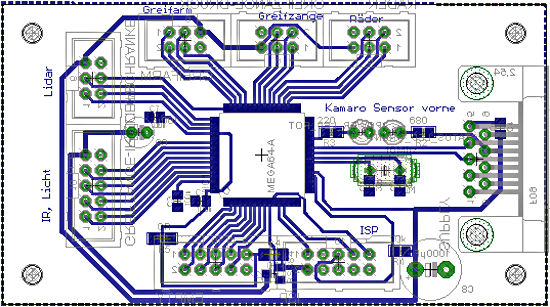
PCB Layout
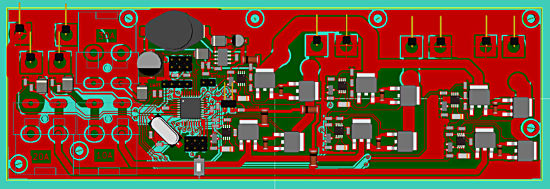
3D Layout of the Power Supply PCB
Manufacturing
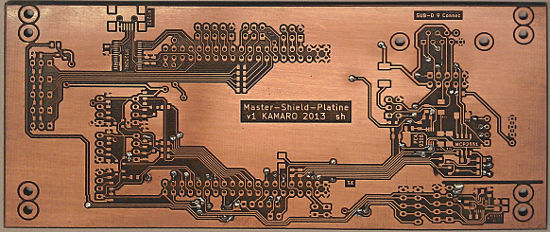
Milled Master Shield PCB (Manufactured at the ITIV Institute)