KaMaRo 2010
Our first robot. A box on wheels - full of ideas!
![[KaMaRo 2010]](/img/Roboter_2010_rdax_1240x659.JPG)
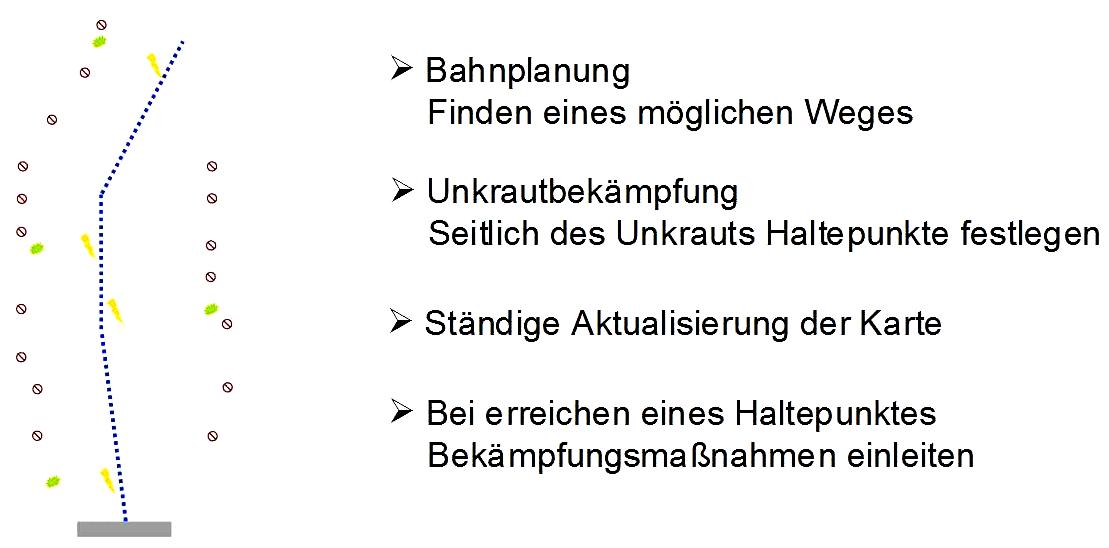
Concept
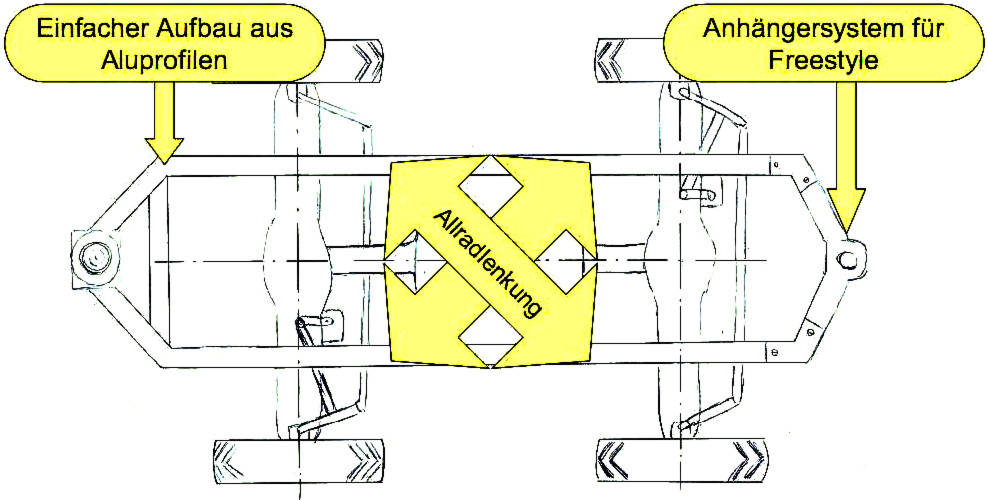
- Two individually steerable axles, four wheel drive
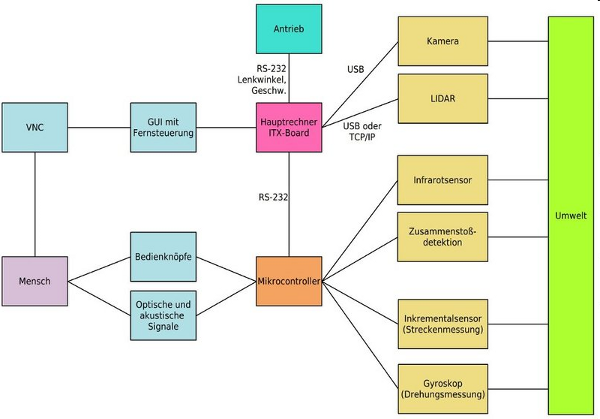
- Navigation via LIDAR laser sensor and additional ultrasonic and infrared sensors for collision prevention
- Object recognition via digital camera
- On-board ITX-Computer
Mechanics
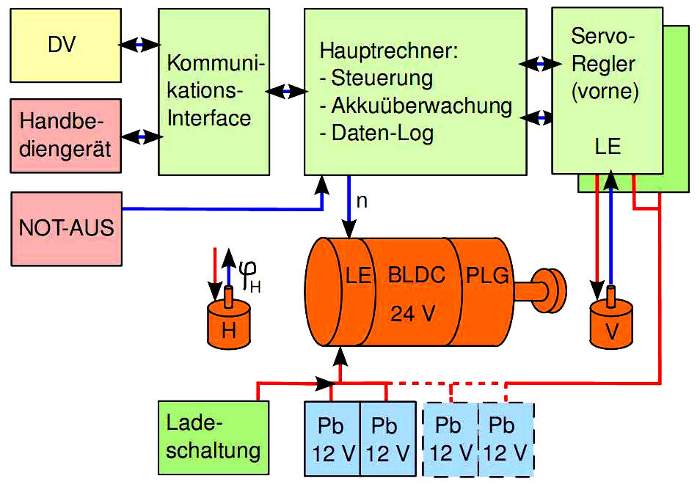
Elektronics
Software